Aluno: Rubens da Silva Braz Filho
Pesquisador Responsável: Alexandre Ricardo Soares Romariz
Resumo
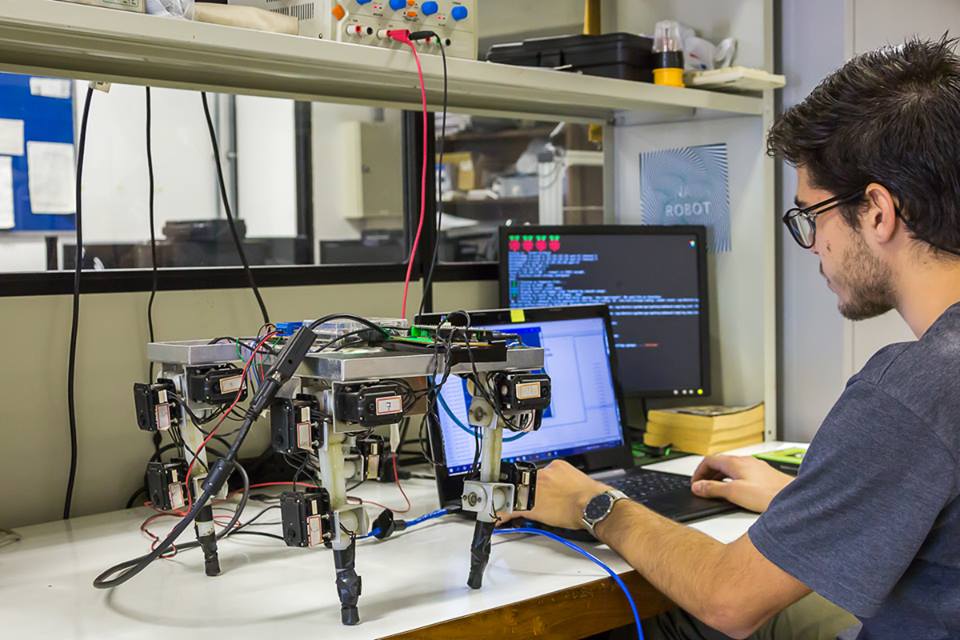
Este projeto de pesquisa explora o Aprendizado por Reforço para melhoria de marchas de um robô quadrúpede. Tais marchas são geradas por parâmetros e, com um algoritmo em Python que interpreta notas, foi possível obter uma melhoria de pouco mais de 30% na distância percorrida em comparação com a melhor marcha obtida no trabalho de conclusão antecessor a esse projeto.
Link para ver relatório do PIBIC completo: Link
Vídeos das marchas obtidas: Link
Deixe um comentário